Robot stworzony przez naukowców z łatwością może przemieszczać się po lądzie i pływać w morzu. Dzięki specjalnym siłownikom, ta specyficzna amfibia oferuje zróżnicowane formy lokomocji.
Większość zwierząt potrafi błyskawicznie przejść od chodu, przez skakanie lub pełzanie, do pływania. Nie wymaga do tego żadnych zmian strukturalnych, robi to całkowicie automatycznie. Współczesne roboty – nawet najlepsze – takiej zdolności są pozbawione. Naukowcy z Carnegie Mellon University stworzyli jednostkę, która może to zmienić. Szczegóły opisano w Advanced Materials Technologies.
Inspirowaliśmy się naturą, aby stworzyć robota, który może wykonywać różne zadania i dostosowywać się do środowiska bez dodawania siłowników lub złożoności. Nasz bistabilny siłownik jest prosty, stabilny i trwały, a także kładzie podwaliny pod przyszłe prace nad dynamiczną, rekonfigurowalną miękką robotyką. Dr Dinesh K. Patel z Matter Lab z Carnegie Mellon University
Ten robot chodzi i pływa
Siłownik bistabilny jest zbudowany z wykonanej w technologii druku 3D miękkiej gumy i zawiera sprężyny ze stopu metalu z pamięcią kształtu, które reagują na prąd elektryczny. Kurcząc się powodują wygięcie siłownika. Naukowcy wykorzystali ten bistabilny ruch do zmiany kształtu siłownika i samego robota – podobnie jak człowiek modyfikuje pozycje ciała z chodu do pływania.
Czytaj też: Ten robot potrafi grać w piłkę nożną. Nie przebije Messiego, ale może uratować ci życie
Dopasowanie do tego, jak zwierzęta przechodzą od chodzenia do pływania, przez pełzanie do skakania, jest wielkim wyzwaniem dla bioinspirowanej i miękkiej robotyki. Prof. Carmel Majidi z CMU’s College of Engineering
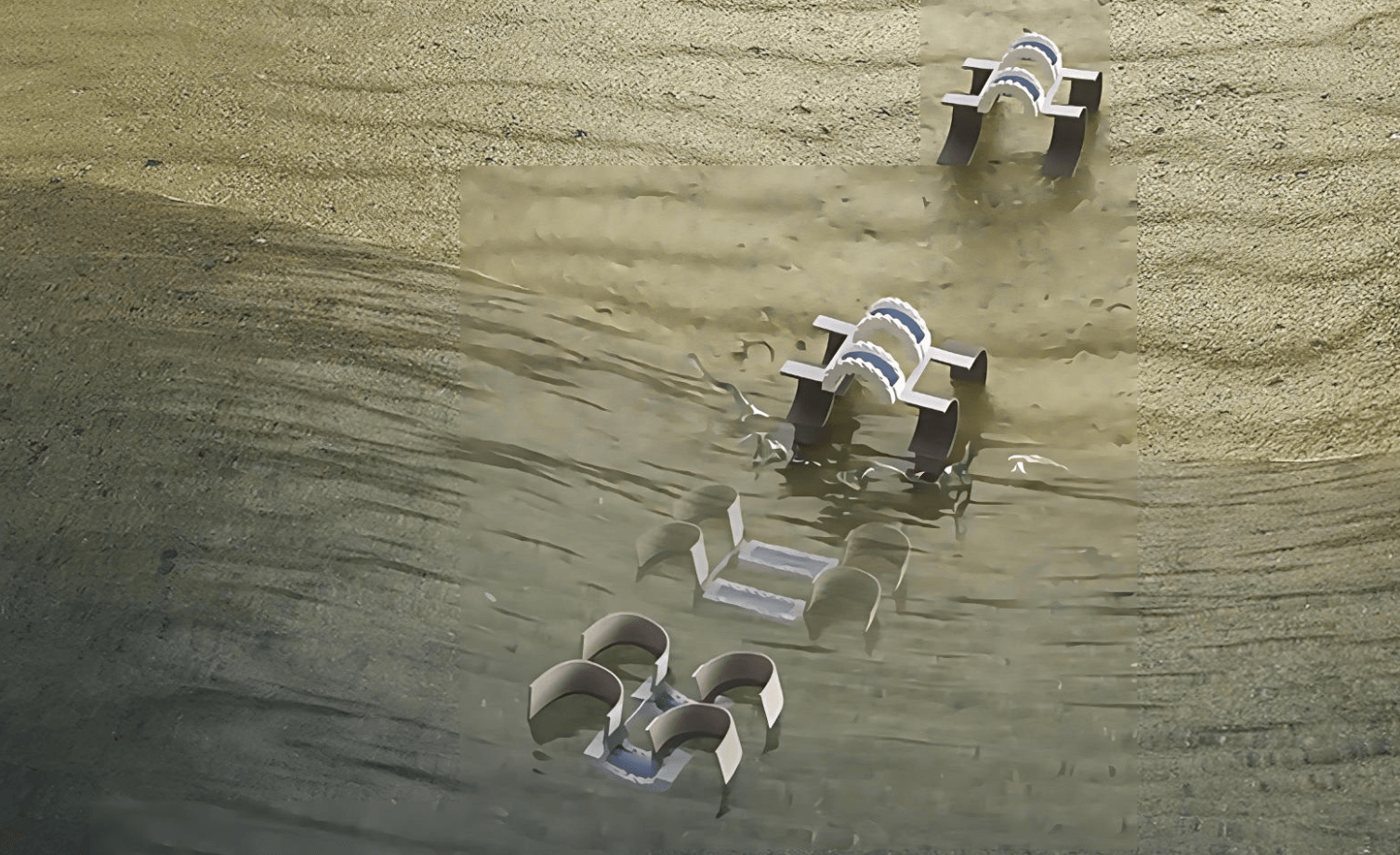
Jeden ze zbudowanych robotów ma cztery zakrzywione siłowniki przymocowane do rogów korpusu wielkości telefonu komórkowego, wykonanego z dwóch bistabilnych siłowników. Na lądzie zakrzywione siłowniki działają jak nogi, umożliwiając robotowi chodzenie. W wodzie siłowniki bistabilne zmieniają kształt robota, dzięki czemu zakrzywione siłowniki znajdują się w idealnej pozycji do pełnienia, co umożliwia mu pływanie.
Aby chodzić po lądzie, trzeba mieć nogi, a aby pływać w wodzie, trzeba mieć śmigło. Budowanie robota z oddzielnymi systemami zaprojektowanymi dla każdego środowiska zwiększa złożoność i wagę. Używamy tego samego systemu dla obu środowisk, aby stworzyć wydajnego robota. Xiaonan Huang, asystent profesora robotyki na Uniwersytecie Michigan i były doktorant Majidiego
Stworzono także dwa inne roboty: jeden, który mógł pełzać i skakać oraz drugi inspirowany gąsienicami, który mógł pełzać i toczyć się. Zastosowane siłowniki wymagają jedynie 100 ms ładunku elektrycznego, aby zmienić swój kształt. Są przy tym wyjątkowo trwałe. Mogą być podstawą robotów wykorzystywanych do akcji ratunkowych lub interakcji ze zwierzętami morskimi.