
Choć robotyka miękka od lat obiecuje rewolucję w medycynie czy badaniu trudno dostępnych miejsc, jej największą słabością pozostawały „plecaki” – ciężkie pompy powietrza lub zewnętrzne systemy zasilania, bez których te elastyczne maszyny były bezużyteczne. Jednak odkrycie dokonane na Uniwersytecie Princeton może to zmienić.
To właśnie tam inżynierowie stworzyli nową klasę miękkich robotów, które poruszają się dzięki zaprogramowanej strukturze samego materiału. Wykorzystując druk 3D, zasady origami oraz reakcje termiczne, naukowcy powołali do życia konstrukcje, które falują, zginają się i wykonują precyzyjne zadania bez ani jednego tradycyjnego mechanizmu.
Polimery, które „wiedzą”, jak się zginać
Sekretem wynalazku z Princeton są elastomery ciekłokrystaliczne (LCE) – zaawansowane polimery o uporządkowanej strukturze molekularnej. Dzięki zastosowaniu specjalnie zmodyfikowanych drukarek 3D, badacze byli w stanie kontrolować ułożenie cząsteczek w konkretnych strefach materiału. Działa to trochę jak programowanie fizycznego obiektu: inżynierowie ustalają, która część materiału ma zareagować na zmianę temperatury. Te wydrukowane strefy pełnią funkcję zawiasów, które pod wpływem ciepła kurczą się lub wyginają w dokładnie przewidziany sposób.
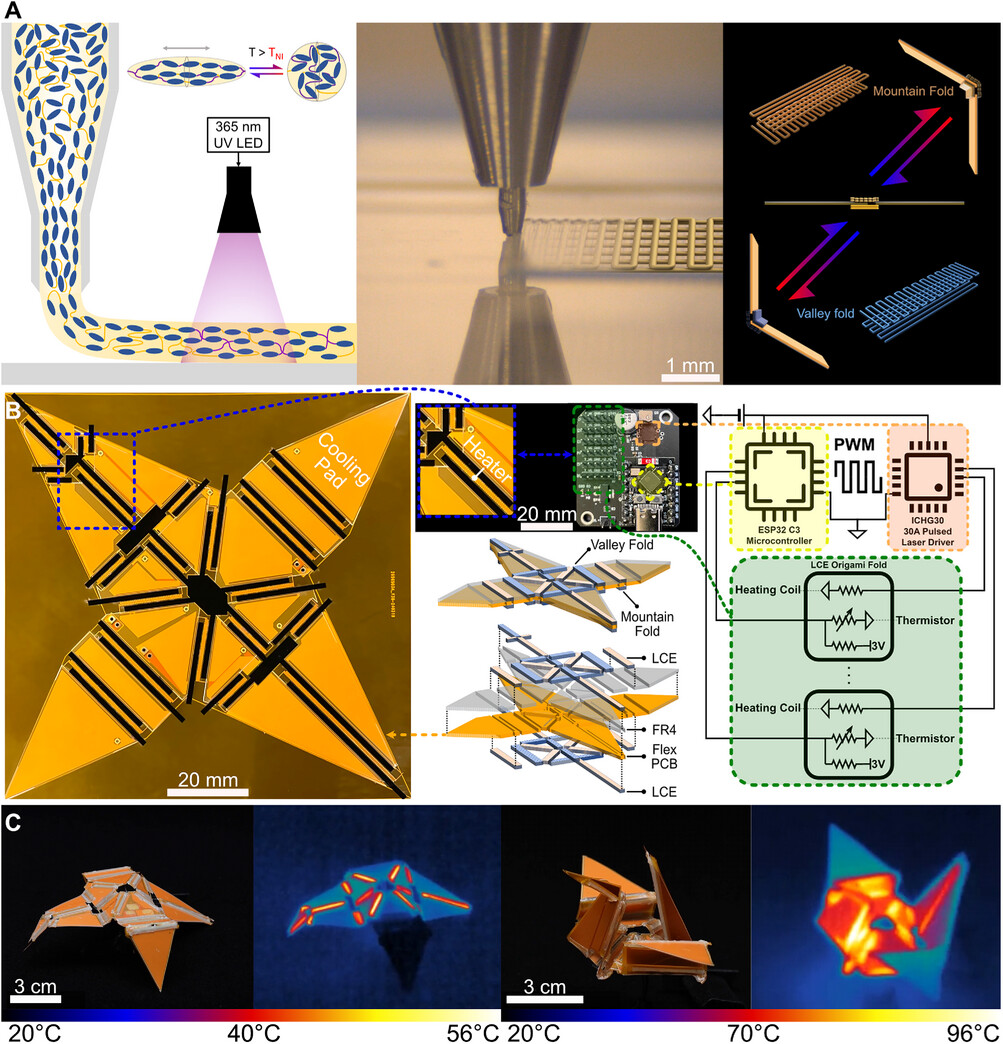
Co czyni ten projekt wyjątkowym, to fakt, że elektronika nie jest do robota „doklejona” na końcu. Elastyczne płytki drukowane są integrowane bezpośrednio w trakcie procesu druku 3D. Dzięki temu powstał monolit – maszyna, która nie wymaga montażu, jest bardziej niezawodna i znacznie lżejsza od wszystkiego, co znaliśmy do tej pory. Aby ruchy były precyzyjne, pomiędzy polimerowymi zawiasami umieszczono lekkie panele z włókna szklanego. Gwarantują one, że konstrukcja zgina się tylko tam, gdzie zaplanowali to twórcy, eliminując przypadkowe odkształcenia.
Matematyka origami i precyzyjne sterowanie ciepłem
Aby te płaskie arkusze zamieniły się w sprawne maszyny, zespół wykorzystał zaawansowane modele matematyczne wywodzące się ze sztuki origami. Jako model testowy zbudowano robota w kształcie żurawia, który po podłączeniu do prądu zaczyna rytmicznie machać skrzydłami. Mechanizm jest prosty, ale skuteczny: wbudowane obwody elektryczne precyzyjnie podgrzewają konkretne sekcje polimeru, wywołując skurcz, który napędza ruch.
Jednak prawdziwym „mózgiem” operacji jest system czujników temperatury, który działa w pętli sprzężenia zwrotnego. Robot w czasie rzeczywistym monitoruje swój stan i koryguje mikroodchylenia. Dzięki temu, nawet po wielu cyklach pracy, ruchy pozostają tak samo dokładne, a materiał nie wykazuje śladów zużycia. Paulino, jeden z liderów projektu, podkreśla, że to właśnie ta zdolność do autokorekty decyduje o trwałości systemu i jego gotowości do wyjścia z laboratorium.
Projekt, który zaczął się jako praca licencjacka Davida Bershadsky’ego, przerodził się w uniwersalną platformę. Bershadsky opracował również narzędzie programowe, które pozwala innym inżynierom projektować własne roboty oparte na tej technologii. Jak sam przyznaje, największym wyzwaniem nie była sama mechanika, ale integracja wielu dziedzin: od inżynierii elektrycznej, przez materiałową, aż po matematykę stosowaną.
Źródło: Advanced Functional Materials