Robotyczna dłoń GelSight EndoFlex jest jedną z niewielu na świecie, które mogą pochwalić się trudnym do osiągnięcia zmysłem dotyku. Wykorzystuje do tego inne osiągnięcie naukowców z tego samego uniwersytetu.
Naukowcy z MIT pokazali GelSight EndoFlex. Ta robotyczna dłoń jest wyjątkowa
Dążenie do zapewnienia robotom ludzkich zmysłów trwa. Naukowcy biorą od lat udział w wielkim wyścigu, w którym zwycięzcą będzie ten, kto odwzoruje m.in. zmysł dotyku w możliwie najtańszy i najskuteczniejszy sposób. Najnowszy owoc tych wysiłków zapewnił światu zespół naukowców z MIT, prezentując GelSight EndoFlex, a więc trójpalczastą dłoń, w której palce są ułożone w kształcie litery Y, z czego na górze znajdują się dwa, a na dole jeden w roli przeciwstawnego kciuka.
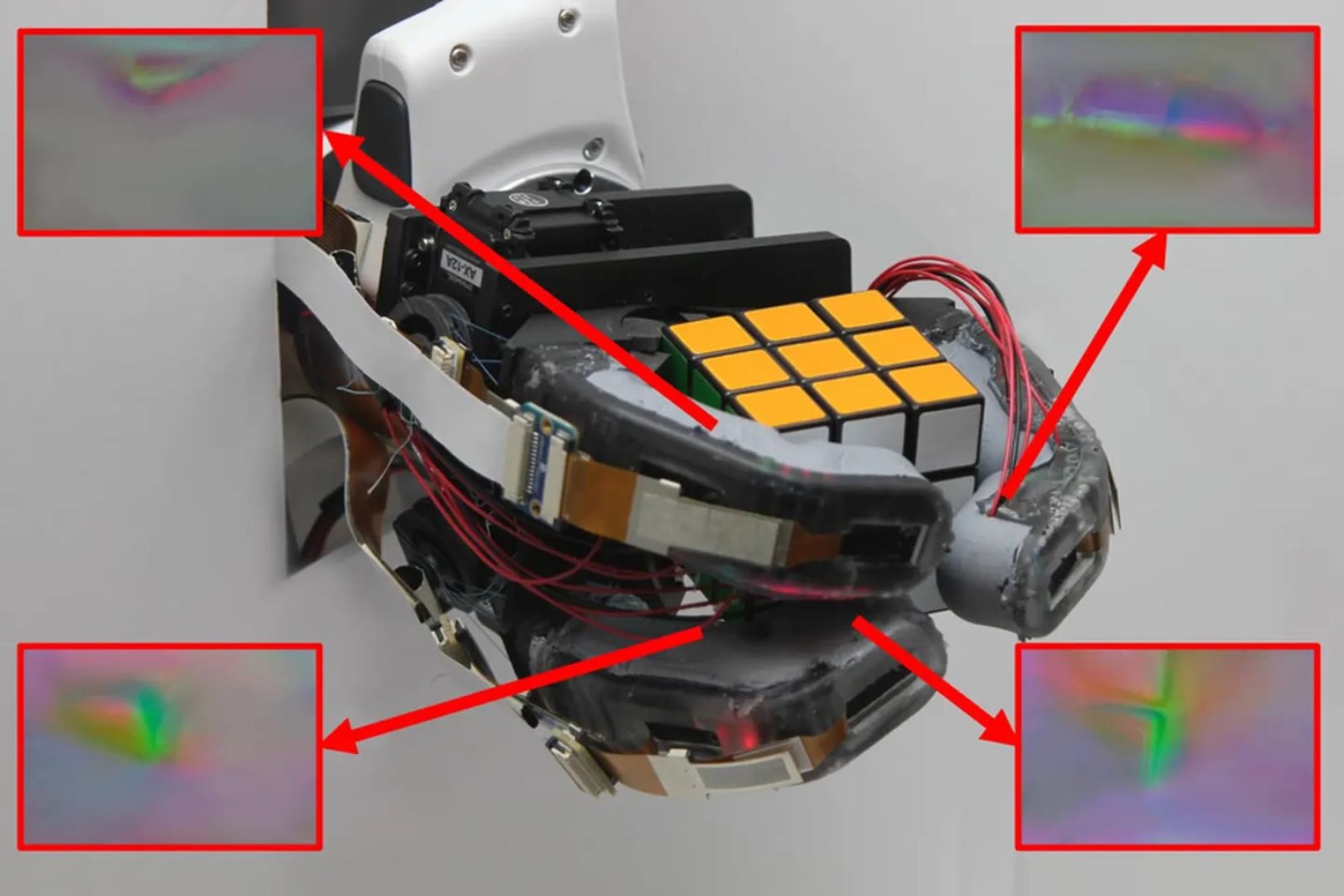
Każdy palec składa się z przegubowego szkieletu z twardego polimeru otoczonego miękką i elastyczną warstwą zewnętrzną oraz wykorzystuje parę czujników GelSight. Te znajdują się na spodzie górnej i środkowej części każdego palca, z czego każdy czujnik zawiera płytkę z przezroczystej, syntetycznej gumy, która jest pokryta z jednej strony warstwą metalicznej farby. Ta pełni funkcję skóry, co sprawia, że kiedy farba jest dociskana do powierzchni, odkształca się do kształtu tej powierzchni. Jest to wykorzystywane przez wbudowaną kamerę, która spogląda przez niepomalowaną stronę gumy i z pomocą trzech kolorowych diod LED może obrazować drobne kontury powierzchni, wciskających się w farbę.
Czytaj też: Wulkany kluczem do zielonej elektroniki. Jak naukowcy chcą je wykorzystać?
Następnie komputerowe algorytmy przekształcają te kontury w obrazy 3D z dokładnością poniżej jednego mikrometra i szerokością około dwóch mikrometrów. Sama farba jest niezbędna w celu ujednolicenia właściwości optycznych powierzchni, co finalnie umożliwia określenie trójwymiarowego modelu przedmiotu w dłoni robota po połączeniu obrazów z sześciu czujników z dokładnością około 85%.
Naszym celem w tej pracy było połączenie wszystkich rzeczy, które sprawiają, że nasze ludzkie dłonie są tak dobre w palec robota, który może wykonywać zadania, których inne palce robota nie mogą obecnie wykonać – wspominają naukowcy.