Ryba-robot może pozwolić na szybszą i dokładniejszą podwodną eksplorację. To dlatego, że ma ona wyjątkowy napęd – macha ogonem jak żywe zwierzę.
Projektując roboty podwodne, potrzeba wydajnego i bezawaryjnego napędu, który jest zarówno energooszczędny, jak i stosunkowo szybki. Naukowcy z Uniwersytetu Bristolskiego zaprojektowali eksperymentalny układ napędowy, w który wyposażyli rybę-robota. Wykorzystuje on zmodyfikowaną wersję mechanizmu znanego jako skręcony i zwinięty polimer (ang. twisted and coiled polymer, TCP).
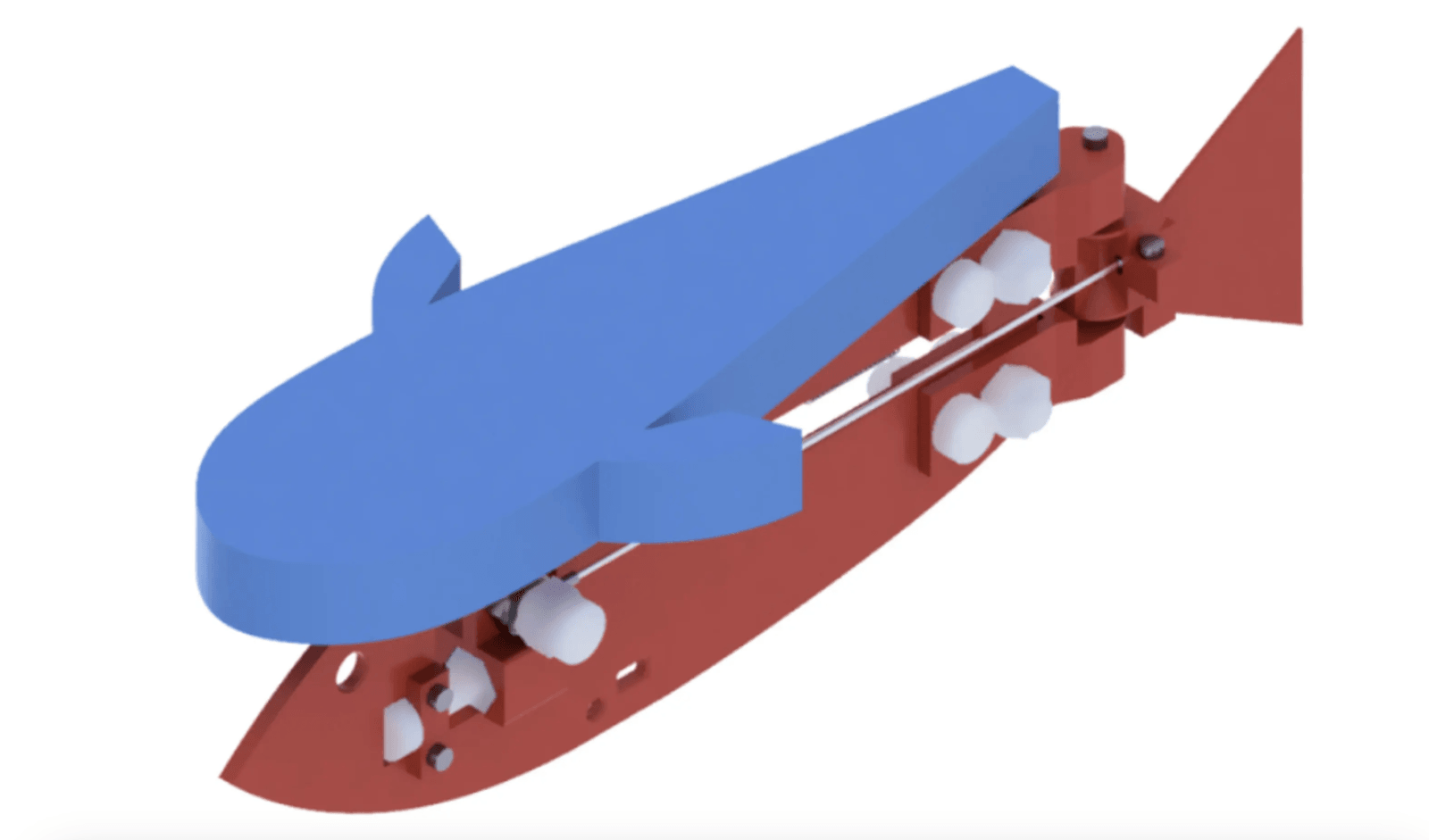
Ryba-robot z napędem TCP
TCP mają postać zwiniętej linii, podobnie jak przewód słuchawki telefonu stacjonarnego. Kiedy lina jest podgrzewana, zwija się ciaśniej, kurcząc się jak mięsień. Po odprowadzeniu ciepła lina ponownie się rozluźnia, powracając do domyślnej długości. Taka forma ruchu jest powolna, gdyż potrzeba co najmniej sekundy odstępu między skurczem a rozkurczem. Ale nowa ryba rozwiązuje ten problem.
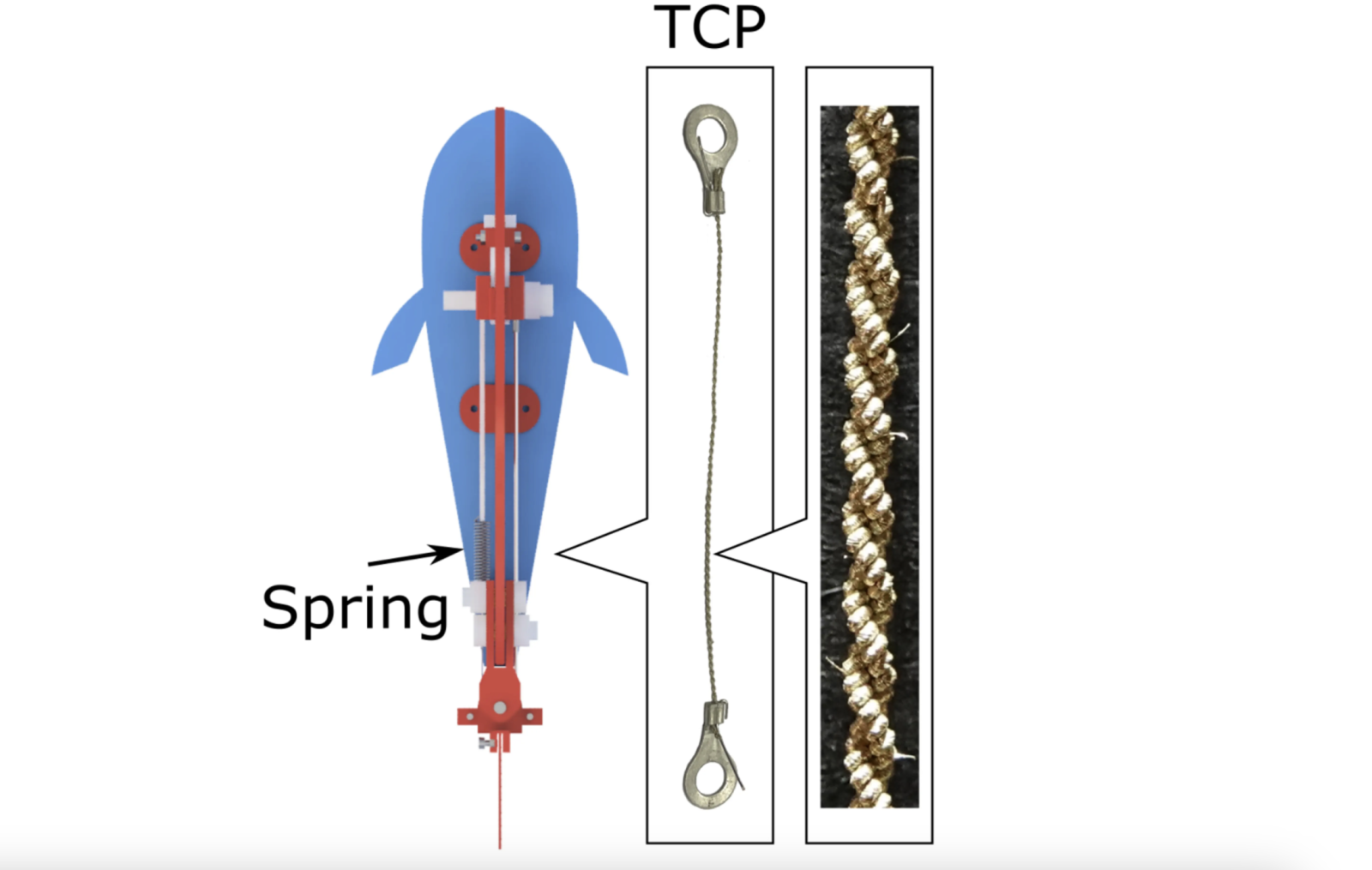
Jednostka zawiera zarówno TCP, jak i konwencjonalną stalową sprężynę śrubową, które leżą obok siebie przez całą długość robota i są połączone z przeciwległymi stronami mechanizmu poruszającego ogonem. Kiedy prąd elektryczny jest przykładany do TCP, nagrzewa się i kurczy, jednocześnie ciągnąc ogon na bok i rozciągając sprężynę śrubową. Kiedy prąd nie płynie, a TCP rozluźnia się, rozciągnięta sprężyna kurczy się, ciągnąc ogon na drugą stronę. Tak powstaje mechanizm zbliżony do naturalnego trzepotania rybim ogonem.
Czytaj też: Nie uwierzysz, do czego jest zdolny ten robot. Takie rzeczy potrafią tylko żywe organizmy
Do tej pory TCP były wykorzystywane głównie w urządzeniach ubieralnych i rękach robotów. Ta praca otwiera więcej obszarów zastosowań, w których TCP mogą być wykorzystane, takich jak roboty morskie do badania głębin i stałego monitorowania przestrzeni.