Pareczniki znane są ze swojego chwiejnego chodu. Mają dziesiątki, a nawet setki odnóży, ale mogą przemierzać każdy teren bez zatrzymywania się. Naukowcy postanowili po raz kolejny zainspirować się ich przyrodą, a stworzony przez nich robot udowadnia, że taki pomysł jest genialny.
Chociaż roboty dwunożne i czworonożne radzą sobie całkiem dobrze z pokonywaniem nierównego terenu, potrzebują do tego wielu czujników i złożonych algorytmów. Zespół naukowców z Georgia Tech kierowany znalazł prostszy sposób, tworząc robota inspirowanego parecznikami. Szczegóły opisano w Science.
Kiedy widzisz parecznika, w zasadzie widzisz zwierzę, które zamieszkuje świat bardzo różniący się od naszego. Nasz ruch jest w dużej mierze zdominowany przez bezwładność. Jeśli zamachnę się nogą, ląduję na stopie i ruszam do przodu. Ale w świecie pareczników, jeśli przestają one machać swoimi częściami ciała i kończynami, w zasadzie natychmiast przestają się poruszać. Prof. Daniel Goldman z Georgia Tech
Robot jak parecznik pomoże zwalczać chwasty
Naukowcy zainspirowali się teorią komunikacji przedstawioną w 1948 r. przez matematyka Claude’a Shannona, który sugerował, że w celu przesłania wiadomości na dużą odległość na hałaśliwej linii, wiadomość ta powinna zostać podzielona na powtarzające się jednostki.
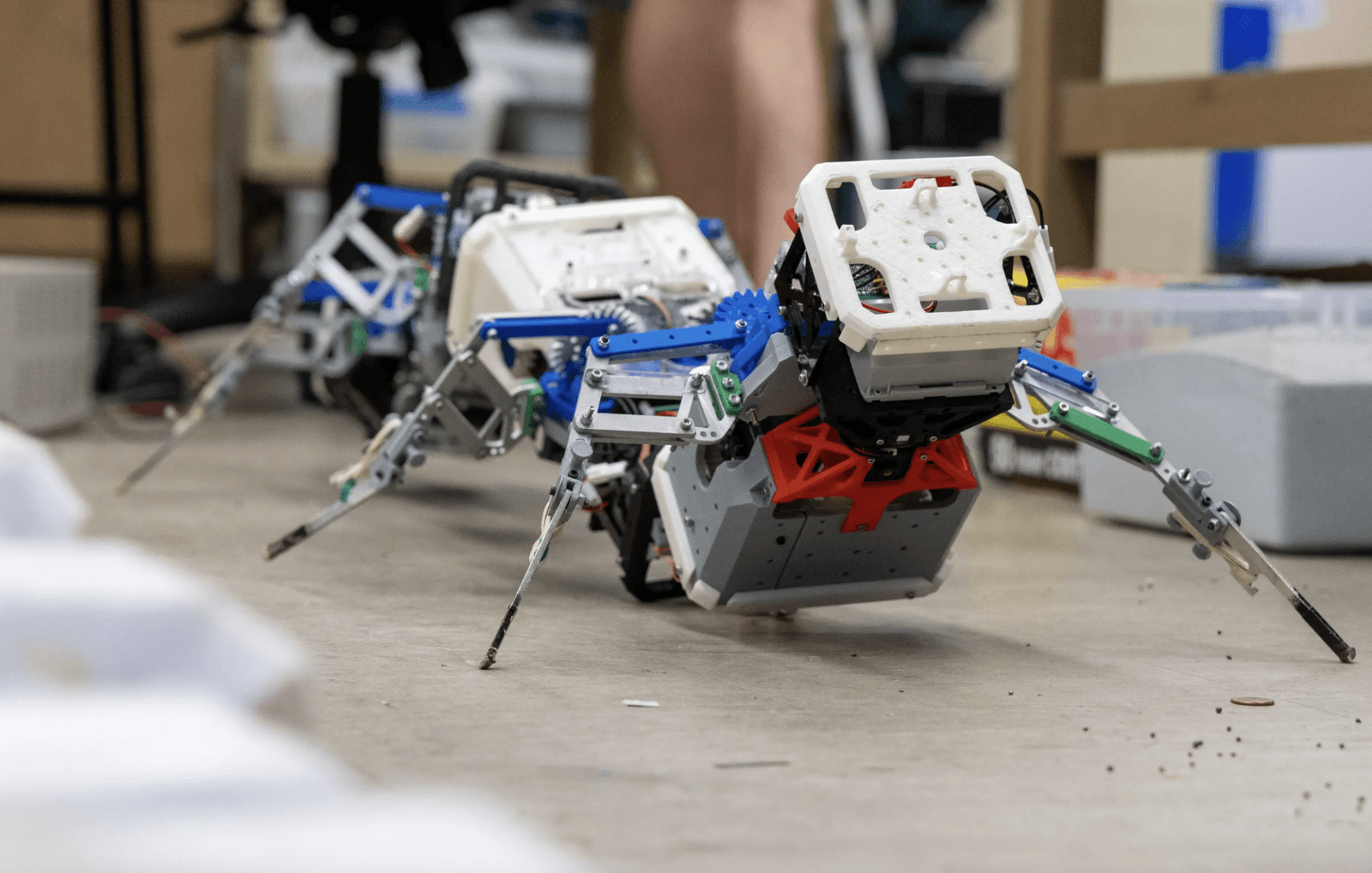
W przypadku robota jednostki te przybrały postać odnóży. Doktorant Juntao He i student Daniel Soto z Georgia Tech zaczęli od robota o sześciu odnóżach, który musiał przedostać się po nierównej powierzchni zaprojektowanej tak, aby naśladować chaotyczne środowisko naturalne. Po każdym biegu naukowcy dodawali dodatkowe pary nóg, aż ostatecznie robot miał łącznie 16 odnóży (8 par).
Czytaj też: Nie uwierzysz, do czego jest zdolny ten robot. Takie rzeczy potrafią tylko żywe organizmy
Okazuje się, że w miarę jak robot zyskiwał więcej odnóży, coraz lepiej radził sobie z pokonywaniem przeszkód. Co ważne, robił to bez użycia jakichkolwiek czujników czy programowania adaptacyjnego. Zamiast tego opierał się po prostu na fakcie, że jeśli jedna lub nawet kilka jego odnóży osłabnie, nadal będzie mnóstwo innych, które utrzymają go w ruchu.

W pewnym momencie koszty wielu odnóży przeważą nad korzyściami. Naukowcy muszą jeszcze określić, gdzie znajduje się ten punkt, dla różnych robotów wykonujących różne zadania w różnych środowiskach.
To naprawdę imponujące być świadkiem biegłości robota wielonożnego w poruszaniu się zarówno po terenach laboratoryjnych, jak i na zewnątrz. Podczas gdy roboty dwunożne i czworonożne w dużej mierze polegają na czujnikach, aby przemierzać skomplikowany teren, nasz robot wielonożny wykorzystuje redundancję odnóży. Juntao He
Naukowcy już stosują swoje odkrycia w rolnictwie. Prof. Goldman jest współzałożycielem firmy, która dąży do wykorzystania tych robotów do odchwaszczania pól uprawnych, gdzie środki chwastobójcze są nieskuteczne. Projekt można jeszcze ulepszyć, dlatego badania wciąż trwają.