Naukowcy ze szwajcarskiego instytutu badawczego EPFL opracowali właśnie czteroramienny zestaw laparoskopowy, który względem innych podobnych projektów wyróżnia się zarówno swoimi dwoma dodatkowymi ramionami, jak i tym, że są one kontrolowane przez stopy użytkownika.
Czteroręki robot jako najlepszy przyjaciel chirurga
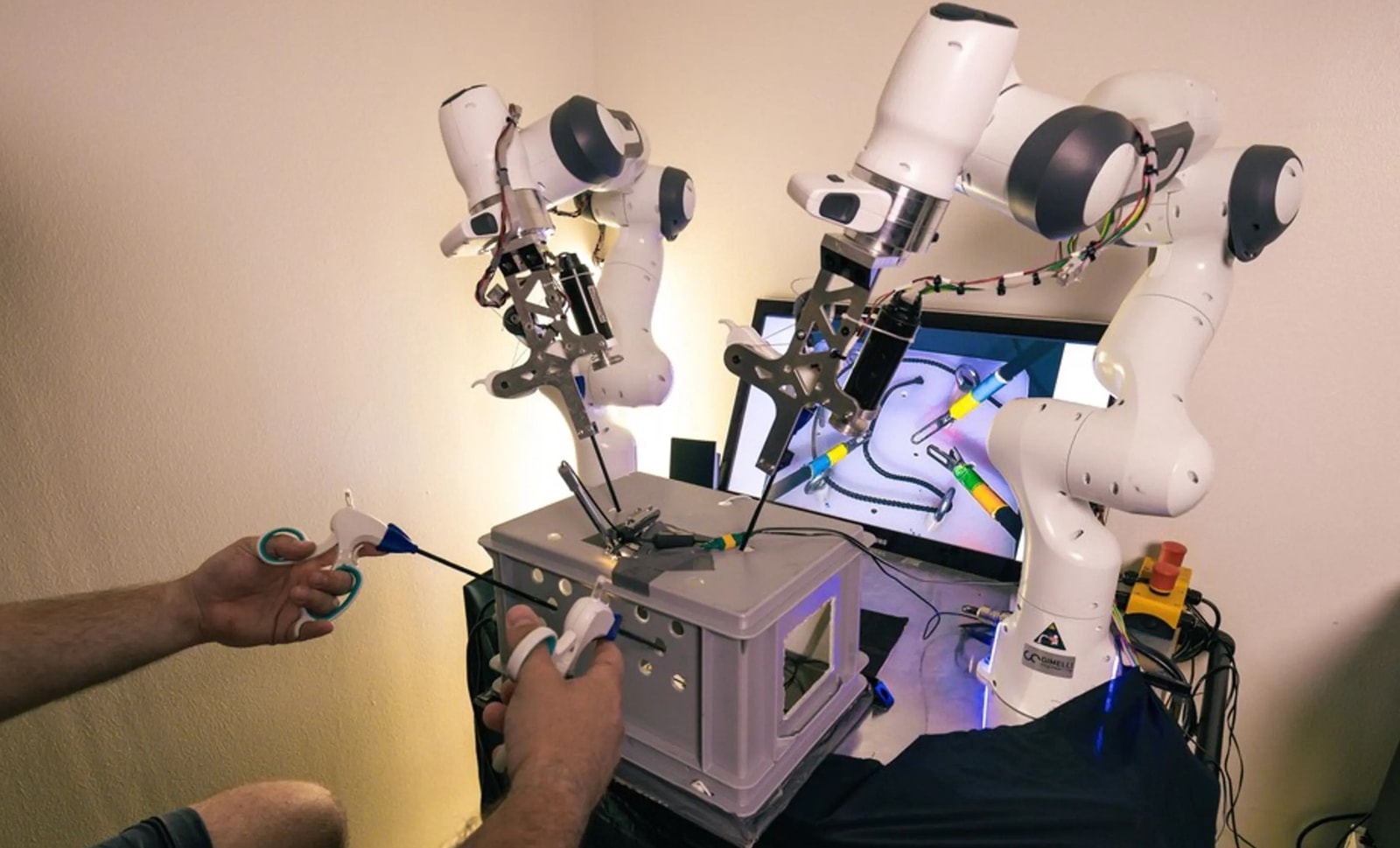
Nienazwany jeszcze oficjalnie system wymaga od użytkownika chwycenia dwóch kontrolerów, przypominających nożycowe chwytaki. Korzystając z nich, potencjalny chirurg może manipulować parą głównych ramion robota, z których każde może trzymać inne podstawowe narzędzie chirurgiczne (takie jak skalpel lub zwijacz) i się nim posługiwać. Z kolei każda ze stóp użytkownika spoczywa na osobnym pedale.
Jeden z pedałów steruje mniejszym ramieniem pomocniczym, które trzyma kamerę endoskopową, podczas gdy drugi steruje drugim pobocznym ramieniem z chwytakiem. Siłowniki w obu pedałach zapewniają haptyczne sprzężenie zwrotne, kierując działaniami chirurga w taki sposób, aby nie stosować zbyt dużej siły w delikatnych obszarach ciała pacjenta. Jako że stopy nigdy nie będą tak dokładne, jak dłonie, system robota posiada pewną dozę automatyzacji, więc z całą pewnością jego wykorzystanie na rzeczywistym pacjencie wymaga długiego procesu szkolenia, podczas którego chirurg przyzwyczajałby się do zaprogramowanych zachowań.
Czytaj też: Robot Morphobot M4 przypomina sprzęt z przyszłości. Wszystko przez swoją wszechstronność
Publikacja w The International Journal of Robotics Research przedstawia w szczegółach to, co osiągnęli studenci w zespole prowadzonym przez doktora Mohameda Bouri, czyli szefa grupy REHAssist na szwajcarskim EPFL.
PS – po więcej materiałów najwyższej jakości zapraszamy na Focus Technologie. Subskrybuj nasz nowy kanał na YouTubie!